| Determining the correct acceleration point is a key part of optimizing a racing line, so in this lesson, we’ll go over a simple way to visualize and understand why the ideal acceleration point is at the apex and why straightaway length doesn’t affect the ideal line through a corner. This doesn't mean that a driver should accelerate at the apex every time however, so make sure to read through to the end of the lesson to learn about the compromises that must sometimes be made. |  1. The Acceleration Point 2. The Ideal Apex 3. The Chicane 4. The Double Apex 5. The Straightaway 6. The 90-Degree Limit |
The Ideal Acceleration Point - From Observation to Insight
This lesson starts a new series covering the core principles of racing line theory, and I wanted to start off with the acceleration point because, not only is it central to line theory, but was also one of my first eureka moments in regards to the physics of racing.
This lesson starts a new series covering the core principles of racing line theory, and I wanted to start off with the acceleration point because, not only is it central to line theory, but was also one of my first eureka moments in regards to the physics of racing.
| When I first started racing in the 2000s, as many analytically minded people often do, I read everything I could get my hands on in my pursuit of knowledge and speed. I delved deep into data analysis, vehicle dynamics, and picked up all the driving technique books as well. With my background in physics, my primary aim was to piece together the principles that governed the ideal racing line. As is depicted in this illustration from Going Faster, the Skip Barber book on race driving, one common theme in the driving technique books was that a driver should generally begin accelerating prior to the apex. The apex is the point on the inside of a corner that a car passes closest to. While some of the driving books didn't make a direct recommendation regarding the acceleration point, the ones that did usually showed that it was before the apex, but didn't seem to offer clear advice on where exactly this point should ideally be. | 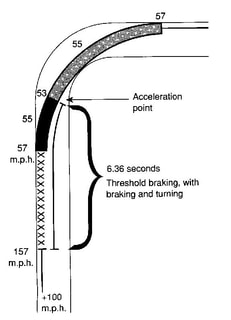 |
I had gotten into sim racing as well, and in my search for more concrete answers, I found several fast lap videos by Greger Huttu, the top sim racer in the world at the time. I’ve held onto these videos and we’ve uploaded them to our YouTube channel so you can view them as well. I’ve linked Greger’s Road America video below, so take a moment to watch the lap while keeping an eye on the speedometer (near the bottom left) and see if you notice what I had noticed about where he accelerates in a corner. It’s important to look at the point of minimum speed, not the throttle, to determine when a vehicle begins accelerating. Due to varying drag forces as well as advanced techniques such as combining throttle with braking, these are not always the same.
In all his laps, the point of minimum speed in a corner where the car begins accelerating was not before the apex as I had read. It was at the apex. To make sure this wasn’t just unique to Greger, I downloaded other Team Redline drivers’ videos as well. While their overall techniques did seem to vary somewhat, the acceleration points were all at the apex. Excited by this revelation, I went looking for videos of top real world drivers as well. This was a good bit harder at the time then it is now, but after finding laps of top drivers in various different types of racing classes, I found one very common trait. They were all accelerating at the apex. While I wouldn’t discover the exact reasons for this until later, based on these observations, I did have one very important realization. The ideal acceleration point was probably at the apex.
Line Radius and Speed are Linked When Driving at the Limit
| One problem is that the racing line is often simply drawn as circular in shape or is hand sketched and sometimes includes sudden radius changes that are not even possible if a car is driven at the limit. If however, the racing line is drawn to accurately depict the relationship between line radius and speed, a lot can be revealed. An important vehicle dynamics principle to understand is that when a car is driven at the limit, its speed and line radius are linked. A higher speed requires a larger radius. What this also means is that when a car decelerates into a corner at the limit, the curve of the line it travels on will become tighter and its radius will progressively decrease. Likewise, as the car begins to accelerate, the curve of the line must open up as the car gains speed and therefore its radius will increase. | 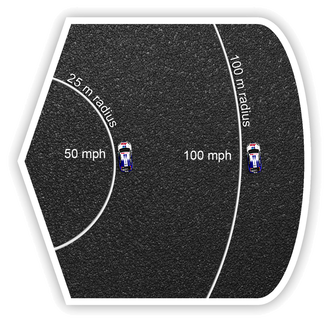 |
This process happens every time a car goes through a corner with the driver influencing the rates of radius change while also deciding when to switch from deceleration to acceleration. For instance, even if a driver attempted a circular (geometric) line through a corner, there would still be at least some radius change. It would just be relatively lower and the acceleration point would be wherever the speed reaches its minimum and starts to climb again. The ideal rates of radius change and therefore shape that the racing line will take is determined by a vehicle’s acceleration vs cornering potential, but we’ll cover that in the next lesson. For now, let’s just look at what the line for a given vehicle would actually look like if it were driven through a corner with an earlier and earlier acceleration point.
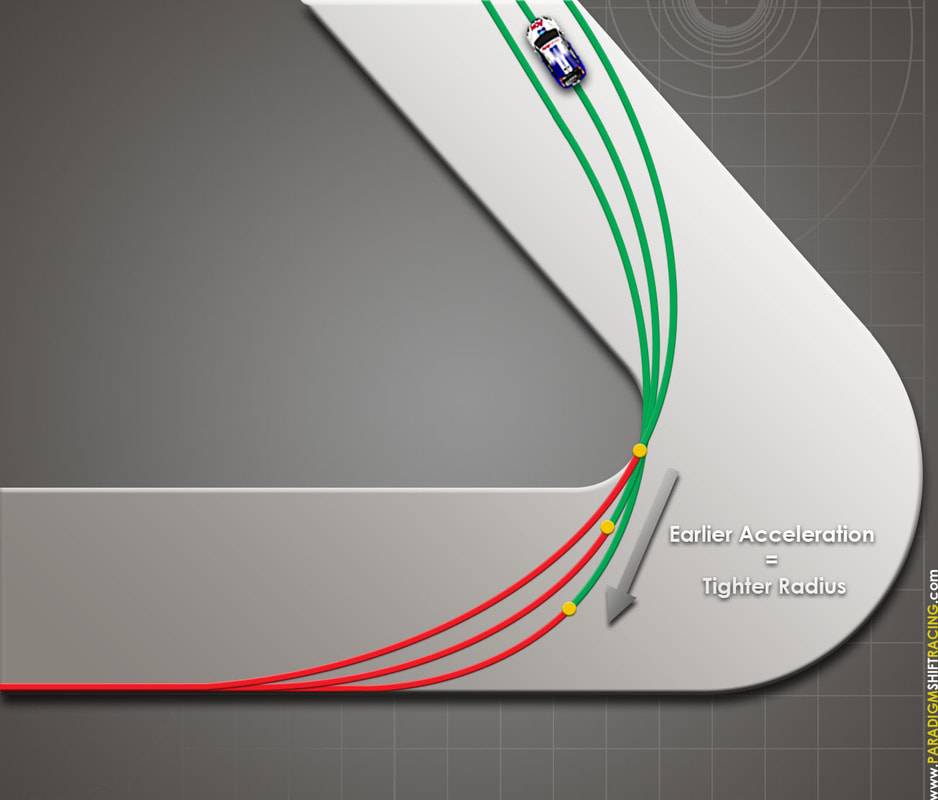
As you can see in the illustration, as the car reaches its minimum speed and begins to accelerate, the line radius shrinks and then increases again as it gains speed. For the earlier acceleration points however, in order to still clear the inside of the track, the car is forced to have a progressively tighter line and smaller minimum radius beforehand to do so. This means the relative speeds along the line will be slower and slower as the acceleration point gets earlier and earlier. Try to visualize how the early acceleration points have effectively just scaled the line down and shifted it earlier in the corner. If a driver accelerated after the apex, the lines would look the same, but flipped to the exit. The illustration shows some very early acceleration points in order to more easily visualize the trend, but the key takeaway here is that achieving minimum speed in a corner somewhere other than at the apex will always make the line tighter than what is possible when the minimum speed is at the apex. This is an important principle to keep in mind and we’ll see it again in upcoming lessons.
Straightaway Length Doesn’t Affect the Ideal Line Through a Corner
The earlier a vehicle accelerates in a corner, the faster it can be traveling as it reaches the straightaway, but we've learned this requires an increasingly tighter line to accomplish. What I would often hear repeated however, is that if the straight is long enough, the higher straightaway speed will make up for the extra time spent in the corner, and a car can be faster overall. This is not true, however. The reason we don’t see top drivers like Greger Huttu accelerating early before long straightaways is that the acceleration point is not a balancing act between corner speed and straightaway speed. Instead, early acceleration simply acts as if the driver is going through a corner that is tighter and earlier than it really is, which just makes it take longer to reach the same speed achieved by an ideal apex.
The earlier a vehicle accelerates in a corner, the faster it can be traveling as it reaches the straightaway, but we've learned this requires an increasingly tighter line to accomplish. What I would often hear repeated however, is that if the straight is long enough, the higher straightaway speed will make up for the extra time spent in the corner, and a car can be faster overall. This is not true, however. The reason we don’t see top drivers like Greger Huttu accelerating early before long straightaways is that the acceleration point is not a balancing act between corner speed and straightaway speed. Instead, early acceleration simply acts as if the driver is going through a corner that is tighter and earlier than it really is, which just makes it take longer to reach the same speed achieved by an ideal apex.
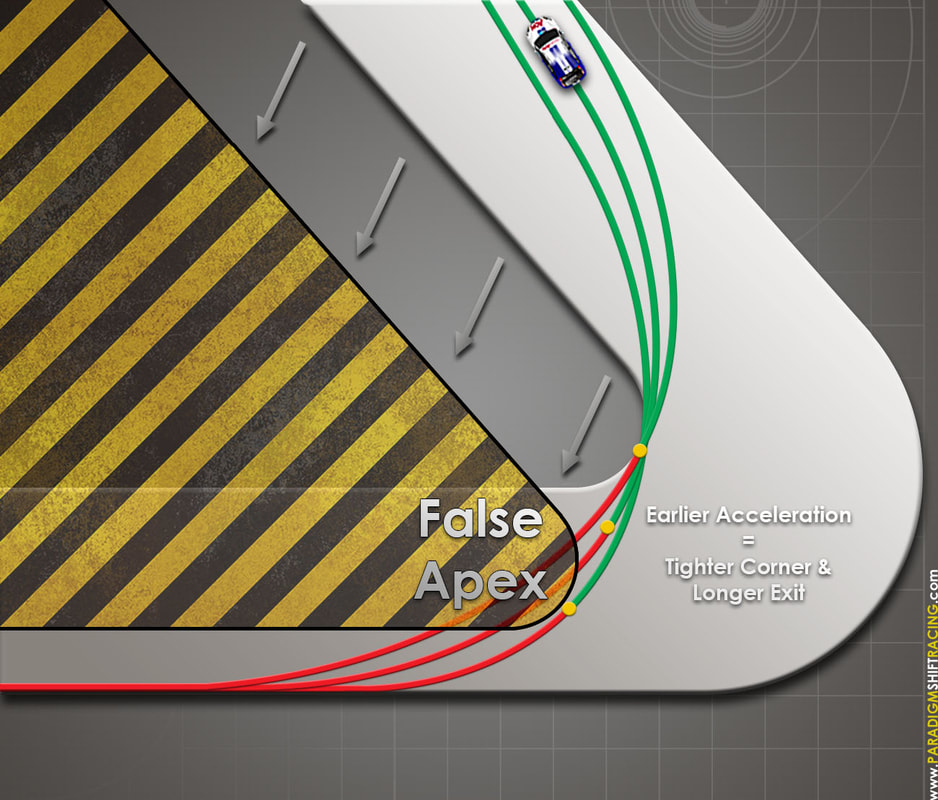
In the image, you can see how the inside of the track has been shifted earlier and outward so that it meets the earliest acceleration point. This is effectively what happens when accelerating prior to the apex because this line would be the best attainable if the corner did have this earlier, tighter configuration. With the original configuration however, this early acceleration point means the driver has made their line tighter and slower than necessary by essentially optimizing for a false apex. The only reason this causes the speed achieved at the beginning of the straightaway to be higher is because the entire corner from the braking point onward has effectively been shifted earlier. This lengthens the exit, which simply gives the car a longer distance to accelerate before it reaches the straightaway, but it will take more time to get back up to that speed because it went through a tighter corner.
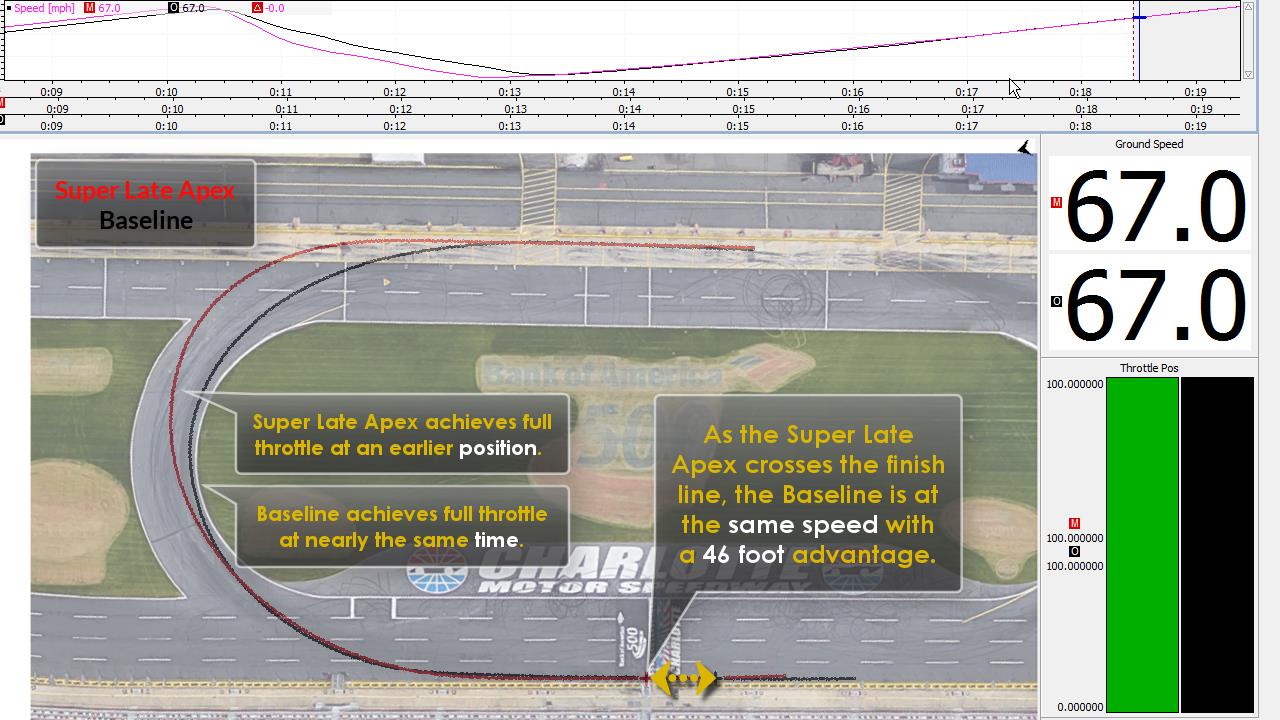
The key point to understand here is that although an early accelerating car can reach a higher speed at a given position at the beginning of the straightaway, at the same point in time, a car driving on an ideal line could already be at an even higher speed and further down the straight. Starting at 7:50 in the video linked below, you can see a demonstration of this principle where two different lines from the same car have been overlaid. You can see how the early acceleration car, which is called Super Late Apex in the video, reaches 67 mph as it crosses a given position at corner exit, while the ideal apex car, called Baseline, only achieves 64 mph at that position. The key however is that, at the same point in time that the early acceleration car reaches 67 mph, the ideal apex car has also already achieved 67 mph, but is 46 feet ahead. This actually represents a best-case scenario for the early acceleration car, as it was at least able to achieve the same speed at the same time as the ideal apex car, but since it traveled a longer distance around its false apex, it is 46 feet behind. Since both cars would be accelerating from the same speed of 67 mph at that point, the ideal apex car would maintain its 46 foot advantage down the straightaway.
The key point to understand here is that although an early accelerating car can reach a higher speed at a given position at the beginning of the straightaway, at the same point in time, a car driving on an ideal line could already be at an even higher speed and further down the straight. Starting at 7:50 in the video linked below, you can see a demonstration of this principle where two different lines from the same car have been overlaid. You can see how the early acceleration car, which is called Super Late Apex in the video, reaches 67 mph as it crosses a given position at corner exit, while the ideal apex car, called Baseline, only achieves 64 mph at that position. The key however is that, at the same point in time that the early acceleration car reaches 67 mph, the ideal apex car has also already achieved 67 mph, but is 46 feet ahead. This actually represents a best-case scenario for the early acceleration car, as it was at least able to achieve the same speed at the same time as the ideal apex car, but since it traveled a longer distance around its false apex, it is 46 feet behind. Since both cars would be accelerating from the same speed of 67 mph at that point, the ideal apex car would maintain its 46 foot advantage down the straightaway.
Before moving on, I do want to mention that once the distance between two corners is short enough, it does have an effect on cornering technique, as they must now be optimized together as a chicane or double apex. While the acceleration points would still be at the apexes, the distance between the corners helps determine how early or late those apexes are. We’ll cover this in future lessons, but it’s important to understand that unless the corners are close enough for this to happen, the ideal apex and line will not change based on straightaway length. In the next lesson, which discusses the ideal apex, we’ll look at another way to understand why the ideal acceleration point is always at the apex as well.
Turning Line Theory Into Racing Reality
As we wrap up this lesson, I want to emphasize that while learning racing line theory is an important first step as it is useful for analysis and understanding the ideal technique, a driver isn’t supposed to simply go out on track and apply these principles directly. Instead, I advocate a progressive approach where a driver learns to gradually internalize these principles so they can actually begin to feel the physics at work out on track. Part of this process is learning the relative time penalties for different types of mistakes. In this case, for instance, it is important to understand that not accelerating until after the apex will generally have a greater time penalty than accelerating before the apex. Sometimes much greater, depending on the car and corner. This fact is surely the reason the classic advice to begin accelerating somewhere prior to the apex originated in the first place, as it can work well for newcomers. While top drivers like Greger Huttu show us what’s possible, attempting to mimic his technique without having the underlying skills can often result in worse times than starting with a more conservative approach using earlier acceleration. Then as a driver’s skills improve, they can push closer and closer to the ideal.
It’s also important to understand that while we can understand and visualize the perfect corner, a driver can never truly achieve it. Even the very best drivers will have constant imperfections in their line and every little imperfection will then change the ideal line for the rest of the corner. It is a constantly moving target and even though we can understand why the ideal acceleration point is right at the apex, a driver can’t simply apply throttle as they pass it because their line up to that point is not going to be perfect. Imperfections might cause their current ideal acceleration point to end up being slightly before, slightly past or even slightly outside the apex. While this wouldn’t be ideal if the entry was done perfectly, it was as close to their current ideal as the driver was able to achieve that time.
Turning Line Theory Into Racing Reality
As we wrap up this lesson, I want to emphasize that while learning racing line theory is an important first step as it is useful for analysis and understanding the ideal technique, a driver isn’t supposed to simply go out on track and apply these principles directly. Instead, I advocate a progressive approach where a driver learns to gradually internalize these principles so they can actually begin to feel the physics at work out on track. Part of this process is learning the relative time penalties for different types of mistakes. In this case, for instance, it is important to understand that not accelerating until after the apex will generally have a greater time penalty than accelerating before the apex. Sometimes much greater, depending on the car and corner. This fact is surely the reason the classic advice to begin accelerating somewhere prior to the apex originated in the first place, as it can work well for newcomers. While top drivers like Greger Huttu show us what’s possible, attempting to mimic his technique without having the underlying skills can often result in worse times than starting with a more conservative approach using earlier acceleration. Then as a driver’s skills improve, they can push closer and closer to the ideal.
It’s also important to understand that while we can understand and visualize the perfect corner, a driver can never truly achieve it. Even the very best drivers will have constant imperfections in their line and every little imperfection will then change the ideal line for the rest of the corner. It is a constantly moving target and even though we can understand why the ideal acceleration point is right at the apex, a driver can’t simply apply throttle as they pass it because their line up to that point is not going to be perfect. Imperfections might cause their current ideal acceleration point to end up being slightly before, slightly past or even slightly outside the apex. While this wouldn’t be ideal if the entry was done perfectly, it was as close to their current ideal as the driver was able to achieve that time.
| I hope you enjoyed this first installment in our new Racing Line Fundamentals lesson series and if you have any questions, please use the comments section below. Up next, we’ll look at the factors that determine the ideal apex and line through a corner. If you are interested in a complete guide to the physics of racing, we also offer The Science of Speed book series, available through our bookstore or at popular retailers such as Amazon. We’ve also just released a new Paradigm Shift Driver Development t-shirt. Adam Brouillard |  1. The Acceleration Point 2. The Ideal Apex 3. The Chicane 4. The Double Apex 5. The Straightaway 6. The 90-Degree Limit |


