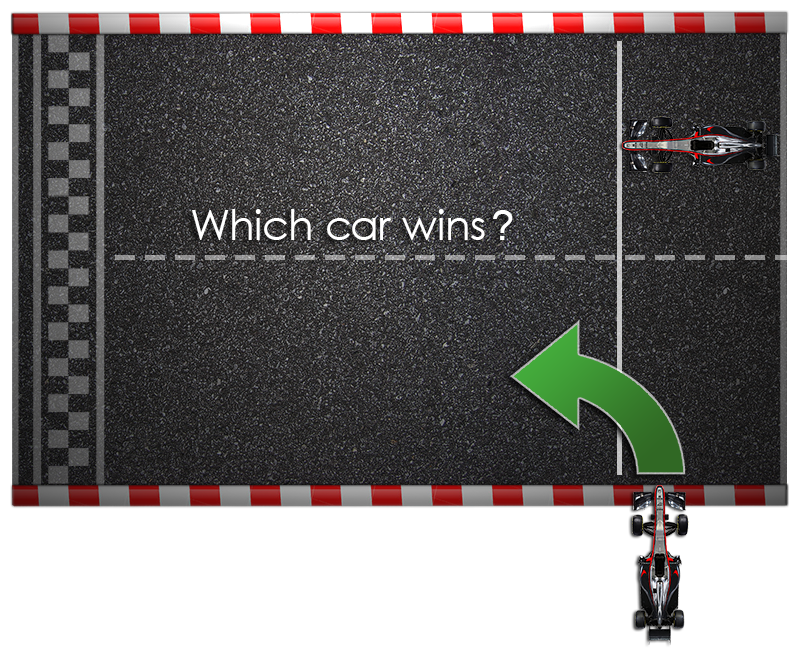
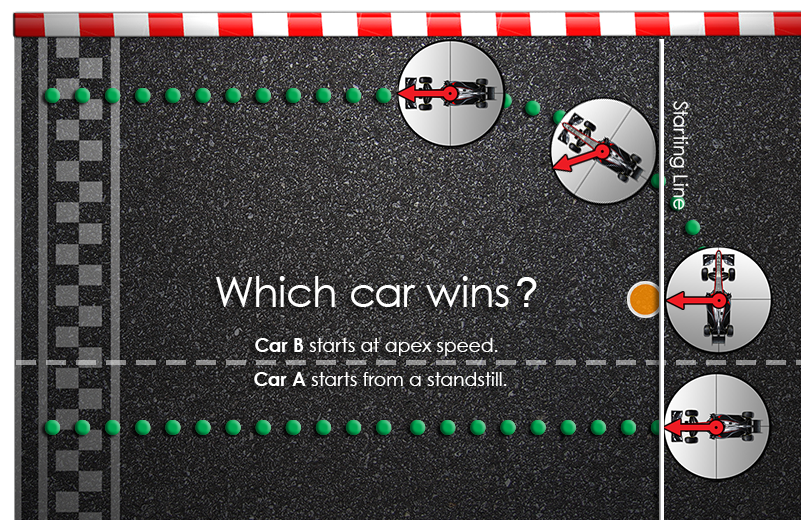
Imagine a drag race between two identical cars. A very unique drag race as shown in the illustration below. One car starts normally, but the other car showed up late so the race starts right as the driver enters their lane perpendicular to the start line. Which car would win? In this lesson, we’ll not only look at the answer, but learn how it can help us optimize our driving on a race track. We'll get to that later, but first let's play a game.
Rethinking the Big Picture
It’s been a few years now since I finished the Science of Speed series so I’ve had plenty of time to work with drivers who’ve read the books, but still have questions. Most of the time these questions can be answered by having them take a step back to make sure they understand the big picture. My first attempt at explaining the big picture was with the “What would the astronaut do?” section at the beginning of book 1. You can read this part in the book preview on our site here. I still really like this section of the book, but I’ve spent a lot of time since the books came out thinking of ways to do this better, so I’ve updated my method and I explain the big picture now as if it’s a game, a board game. This game is how I introduce new drivers to the sport, it’s how I begin my group presentation, and typically I can use it to answer most questions people have, as it explains the core principles of racing physics. It has been the source of countless “Aha!” moments for many drivers so hopefully it might help you in your driving pursuits as well.
The Track
In this game, our board will of course be a race track. Real-world racetracks are often quite complex, but can actually be broken down into just a few basic corner types. The most basic of which is called a standard corner and all standard corners will have three key components. These three components include a corner entry edge, a corner exit edge, and an apex. For those new to the sport, the apex is the point in the middle of the corner that separates the entry from the exit. While our game board will only feature just these three components, understand that even the more advanced corner types such as chicanes and double apexes are built from these three basic components. If you learn the principles to driving a standard corner, you will be well on your way to knowing how to tackle anything a track can throw at you.
Standard corners are not always very standard though, sometimes finding apexes and corner edges can be very challenging. When I’m breaking down a track for a new Track Notes, it is a large complex puzzle with many pieces. Sometimes, the edges of a corner are not actual physical track edges, and the driver will need to instead visualize where they are. Even then, apexes and corner edge placements and angles are not static and will change depending on a car’s capabilities. On top of that, tracks often have sections where we need to connect these components into long unbroken strings that must all be optimized together. Check out the downhill section of Mount Panorama.
Standard corners are not always very standard though, sometimes finding apexes and corner edges can be very challenging. When I’m breaking down a track for a new Track Notes, it is a large complex puzzle with many pieces. Sometimes, the edges of a corner are not actual physical track edges, and the driver will need to instead visualize where they are. Even then, apexes and corner edge placements and angles are not static and will change depending on a car’s capabilities. On top of that, tracks often have sections where we need to connect these components into long unbroken strings that must all be optimized together. Check out the downhill section of Mount Panorama.
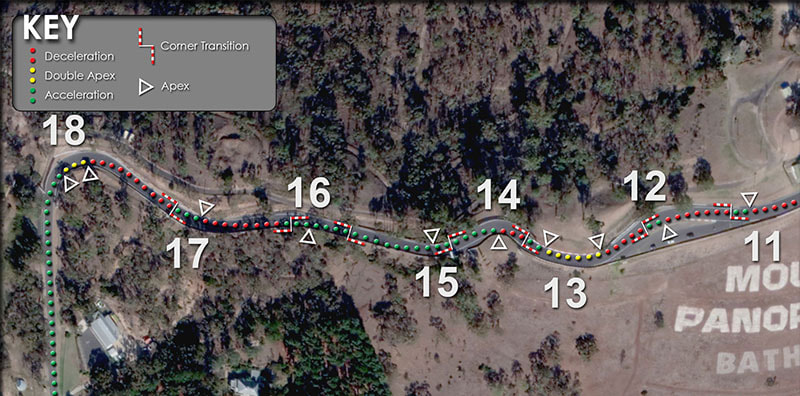
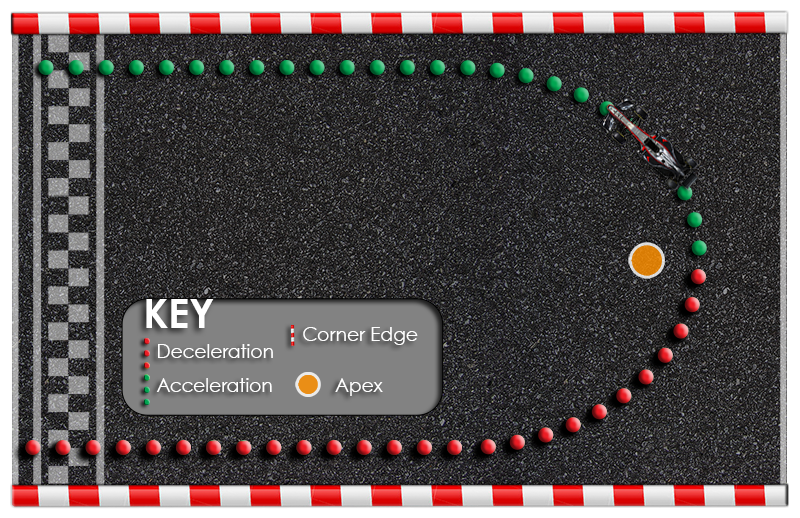
The good news however, is that while identifying these three components is not always easy, the principles that govern them remain constant. In other words, if you can find the three components, you’ll know how to drive them. For our game board race track which you can see below, finding them should be rather easy. All we have is a start/finish line, a corner entry edge, a corner exit edge and an apex. Mount Panorama this is not, but you’ll see how limiting ourselves to a single 180-degree corner will make it much easier to visualize the principles this game teaches us.
The Car
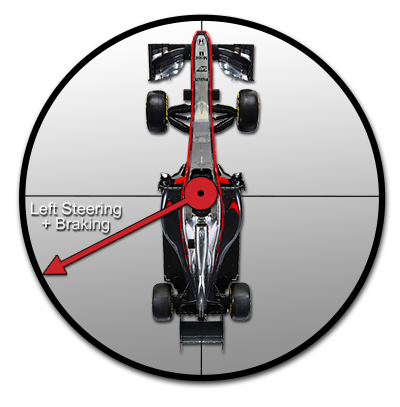
Now that we have our game board, we need our game piece, which is of course, a car. Learning to control a car at the limits of traction is a massive topic and that’s why I dedicated an entire book in the series to it. The end result of all these car control efforts is actually pretty simple however. Car control is about maximizing and directing the combined tire forces. To represent this, our game piece car will have a spinner arrow originating from its center. The arrow shows the direction the driver is maximizing the combined tractive abilities of the tires. Directly to the side would be simply turning at the limit of traction, directly forward would be maximum acceleration, and likewise directly backwards would be threshold braking. Diagonals show combinations of steering, braking, and acceleration. For a bit more info about a car’s and therefore our game piece’s capabilities, you might want to also take a look at the “Vehicle dynamics simplified” section on pages 14-16 of the book sample.
The Object of the Game
As on any racecourse, the basic objective of this game is to complete a lap in the minimum time possible. We must pass the start/finish, clear the apex point, and then cross the start/finish again. Take a moment to consider the capabilities of our game piece and how you might be able to maximize them to complete this challenge. Keep in mind that we can pass the start/finish at any angle, at any point. We can make a big arc around the apex or a small one. If you are a seasoned racer, try to look at this with a fresh perspective. The solution may turn out to be one you are familiar with, but the true reasons for this might be surprising.
To help you along in this challenge, let’s break it down into its individual components. That way we can make sure we understand each part separately and that should help us with our final solution once we put it all back together. There are three components to this challenge. Corner entry, which is getting from the start line to the apex. Corner exit, which is getting from the apex to the finish. Then our last component is that we will have to turn the car around at the apex.
To help you along in this challenge, let’s break it down into its individual components. That way we can make sure we understand each part separately and that should help us with our final solution once we put it all back together. There are three components to this challenge. Corner entry, which is getting from the start line to the apex. Corner exit, which is getting from the apex to the finish. Then our last component is that we will have to turn the car around at the apex.
A Basic Drag Race
Let’s start with corner exit, which again is where we have to get from the apex to the finish line in the minimum time possible. We aren’t concerned with turning the car yet, so in essence, this is just a basic drag race. We start from a standstill at the apex and accelerate toward the finish line as quickly as possible.
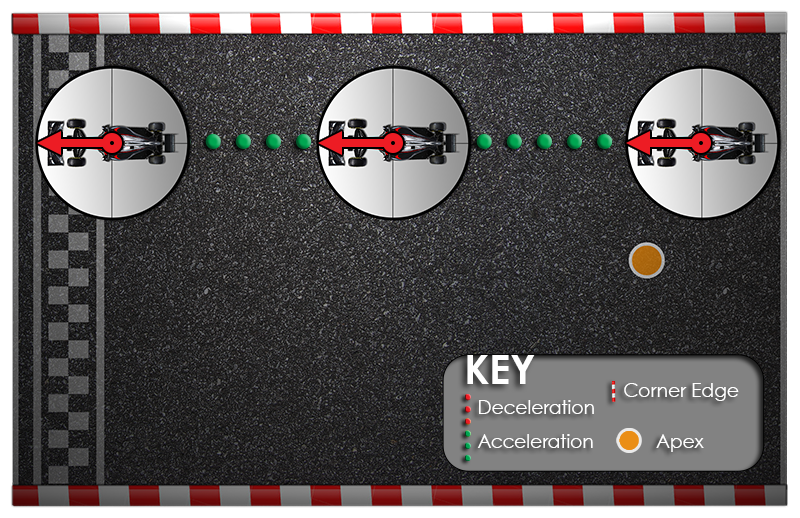
It should hopefully be apparent that our best strategy is to have our game piece car make a straight line toward the finish with the force arrow pointing directly ahead. Remember, the arrow pointing directly forward on the car means that the driver is using his controls to maximize the combined tire forces to propel the car straight ahead. As in any drag race, this would typically require some throttle management to avoid wheelspin, some steering corrections to stay in a straight line. Maybe a shift or two. Again, this is all secondary and taken care of by our fantastic game piece driver. We show them where we want to go and they’ll do their best to make it happen as quickly as possible. Everything’s pretty simple so far, so let’s move on to corner entry by reversing this challenge.
A braking Challenge
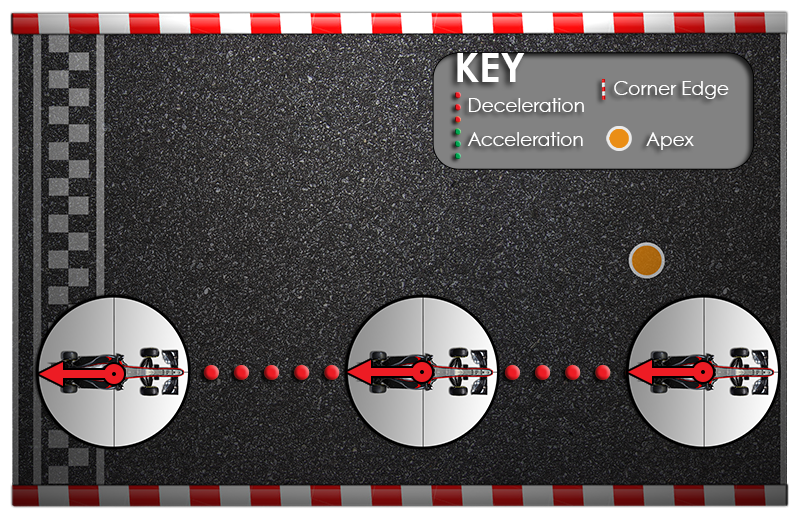
This part of our challenge gets a bit more complex as the driver now has to pass the start/finish and then come to a stop at the apex as quickly as possible. A person’s first instinct is probably that we would want to go full throttle across the start line and then brake at the last possible instant to stop in time. In a way this is correct, but remember that we are trying to look at this from a big picture perspective. What is the ideal solution? To absolutely minimize the time to complete this challenge we want to be going fast enough prior to the start that we are able threshold brake for the entire distance from start to apex. This will give us the highest average speed and therefore the minimum time possible. If we are still accelerating as we cross the start line, we would be losing time.
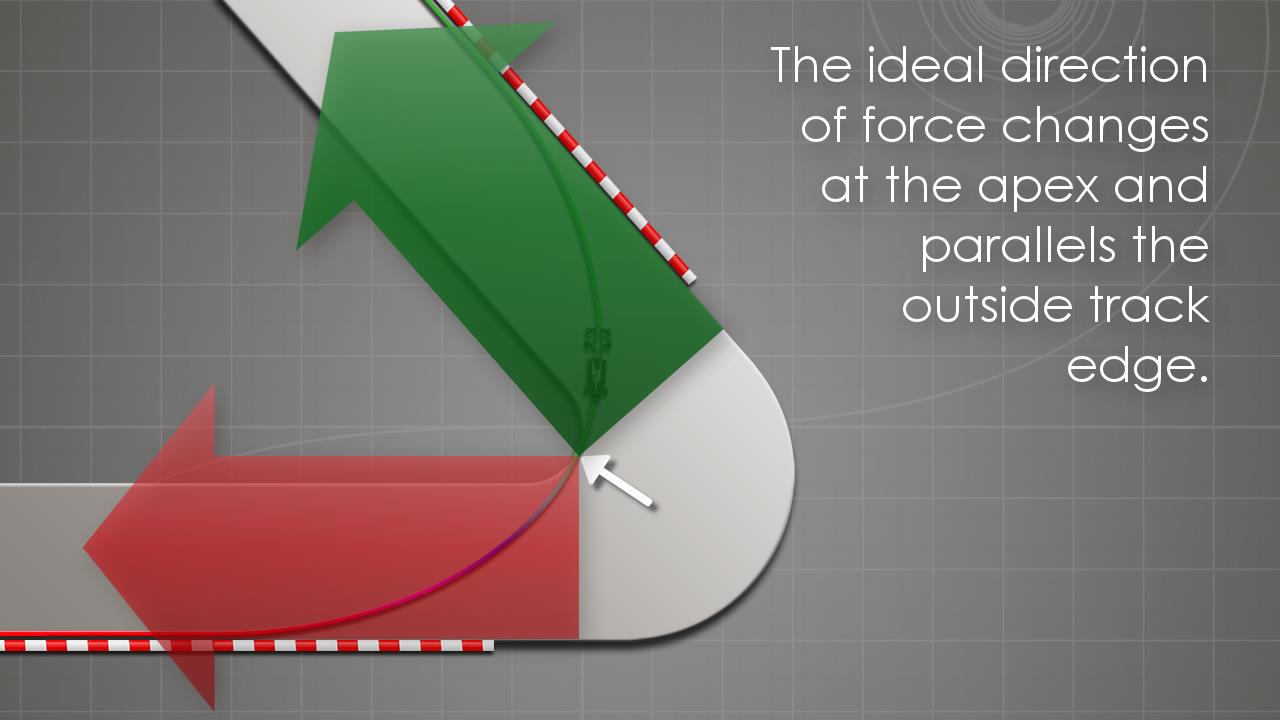
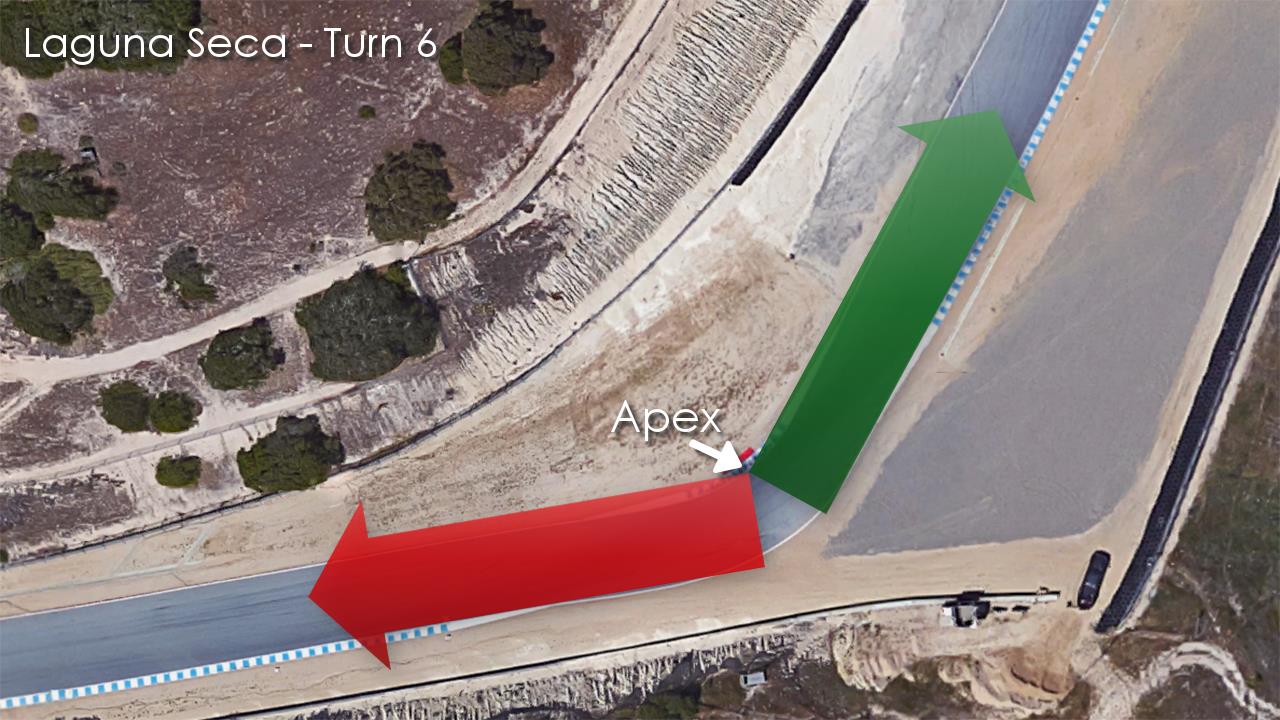
The key takeaway here is that our driver is effectively doing the exact same thing as in the drag race. In both cases, minimum time is achieved by having the force arrow aimed directly at the start/finish. This maximizing of tire forces in the direction of the start/finish will come up a lot as we work through our challenge. We call this the “ideal direction” of force and we’ll see how this concept of maximizing tire forces in one singular direction at a time is at the very heart of what we are trying to accomplish on a racetrack. Although sometimes finding the ideal directions on a racetrack can be difficult, as you can see in the illustrations below, most of the time it simply parallels the angle of the entry and exit track edge and will switch from one to the next right at the apex. To keep our game board track as simple as possible, I’ve intentionally used a 180-degree corner so that the ideal direction is the same for entry and exit and it will always aim directly toward the start/finish.
 |  |
A Corner
The third and final component of our challenge is that we must turn the car. There are countless ways we can accomplish this and although we will eventually look at the ideal technique, I think it’s best we start with the simplest one possible by just driving in a perfect circle. Driving a perfectly circular line through a corner is actually impossible in the real world as it would require instantaneous direction changes, but it will make it easy to understand and give us a nice baseline on which to build.
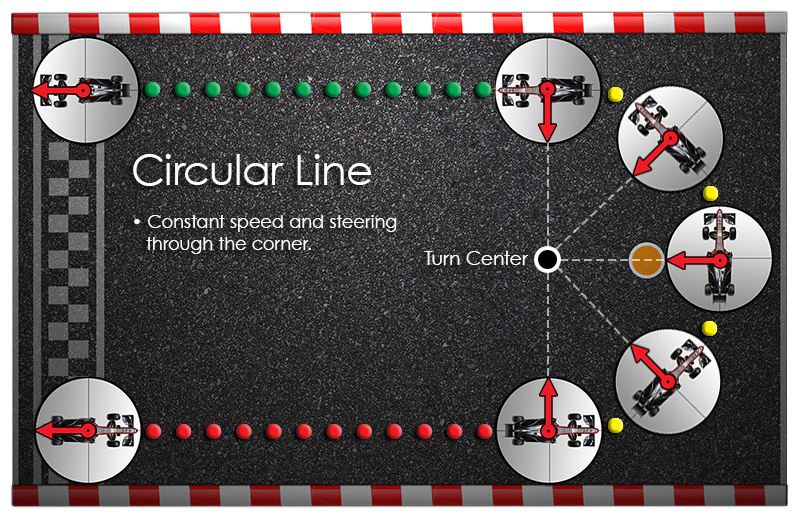
As you can see in the illustration, our force arrow is aimed directly to the side of the game piece car during the turn portion. As we are driving on a constant radius, we are neither accelerating nor decelerating and the combined force of the tires will be aimed directly at the center of the circle. This point is called the turn center. Based on what we’ve learned so far, how effective do you think this strategy is? We’d like to get back to the finish line as quickly as possible, but it seems our driver is trying really hard to get to the turn center instead. This is why a circular line is a poor strategy that costs a lot of time because it is wasting a lot of tire force that could instead be pushing the car in the ideal direction. Well then, why don’t we just drive a line with the arrow on our game piece constantly pointing back toward the finish?
Unfortunately, this is simply not possible because the direction of the force arrow directly dictates the shape of the line. The only way to keep the arrow pointing in the ideal direction the entire time is to go straight out and straight back in a perfect line. Most cars don’t drive so well in reverse so we’ll have to move off a direct line and drive some sort of arc to get the car turned around. This will require at least some force aimed toward the center of the turn and although this is essentially wasted force as it’s not helping get us to our goal, it will be necessary. How much of this turning force do we need though? Let’s move on to a more effective line strategy as we begin to answer that question.
The Basic Racing Line
A driver’s first few trips to a racetrack can be an exhilarating, but also overwhelming experience. That’s why when I’m working with a newer driver, I start them off with a simple driving strategy that gives them just a few basic goals to focus on. I’ve previously detailed this in an article entitled The Basic Racing Line. I recommend you take a few minutes to read it, but the basis of it is that the driver should try to go to throttle at the apex and then use what happens to update and modify their line. If the car is not pushed to the track edge during corner exit, then they should try to go faster at the apex. If instead, they have to reduce throttle at some point during the exit in order to avoid running off track, then go slower at the apex. Once they show they can do this part competently, the final important aspect of this strategy is that they should start trying to carry enough speed into the turn that they are actually unable to get on the throttle prior to the apex. Once the driver is able to do all of this, it creates a line that has them decelerate to the apex and then accelerate out. Let’s use this strategy for our game challenge and see why it works.
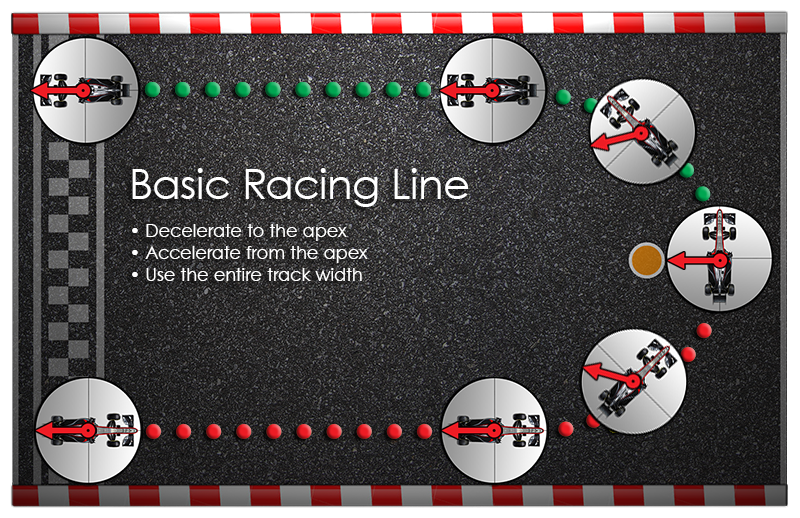
This illustration shows how our game piece car will look by following my basic racing line strategy. Instead of the force arrow staying directly to the side of the car as it did in the circular line, notice now how it moves from the back of the car to the side as the car decelerates toward the apex and then moves toward the front as the car accelerates during corner exit. You’ll notice how this changes the shape of the line, but what is most important is that the force arrow is aimed more toward the ideal direction throughout the corner than it was in the circular line. Just as increasing force toward the start/finish line would drop our times during the drag race and braking challenge, the same holds true here as well. Go to 5:05 in the following video for a direct head-to-head comparison between the circular (geometric) line and the basic racing line (baseline.)
So we can understand now why we want to decelerate to the apex and accelerate out, but what about the other part of the basic racing line strategy. Why do we want to find an apex speed that allows us to use up the entire width of the race track? To answer this, let’s finally have that drag race.
The Corner Exit Drag Race
As mentioned at the beginning of the lesson, this drag race is between two identical cars, but it’s definitely not a standard drag race. Car A will start from a standstill in typical drag race fashion, but car B will start the race midway through the corner right as it passes the apex. Based on what’ve we’ve learned so far, do you have any ideas on which car would win? As you consider your answer, realize that neither car is getting a head start. Just like car A, car B starts with zero velocity toward the finish line. Car B would have some velocity, but it is aimed directly at the side of the track as the race starts. The side of the track is not the goal however, is it?
Taking what we've learned so far, we can deduce that the winner of this race would of course be car A. Car B is going to have to aim some of its tire forces toward the center of the turn to stop its sideways velocity and complete the turn. This reduces the amount of tire force it has left to accelerate in the ideal direction. This raises a big question however, why does our racing line make a big arc through the corner anyway? In racing, fast seems like a good thing, but apparently going fast across the apex here is just slowing us down. It seems like it would actually be a better strategy to go slower past the apex and make a smaller arc through the turn? We would waste less tire force turning the car, which means we’ll have more tire force left to accelerate us to the finish line.
As you can see in the illustration, in these circumstances, this smaller arc is in fact how we would want to optimize the corner. Actually, we would want to drive the absolute smallest arc possible to minimize turning forces, which would leave as much tire force as possible to propel the car in the ideal direction. But wait, that’s the exact opposite of what I said earlier. What’s going on here and why is part of the basic racing line strategy to increase apex speed until the car needs the entire width of the track? The reason is that our game piece would actually represent a car with some rarely seen performance specs. To find out why we actually do typically want to use the entire track width, we’re going to need a new game piece representing a more typical race car.
A Real Traction "Circle"
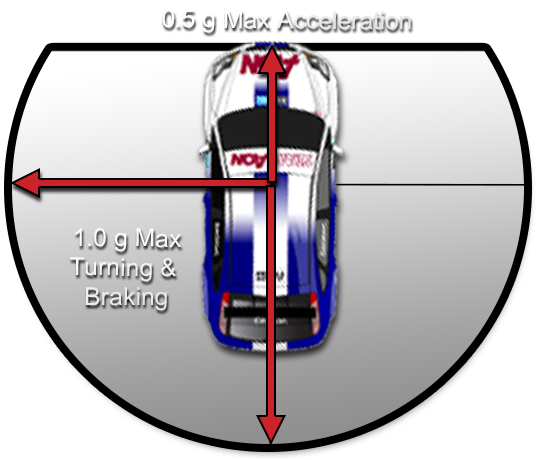
A traction circle is commonly depicted as round because it represents the fact that a typical tire can only generate maximum force in one single direction at a time. For example, if you are at maximum braking, you have no traction left to turn, or vice versa. It only makes sense then that if we combine all four tires, their combined traction circle would also be round. While this is sometimes the case, it’s actually pretty rare. This is because while most cars can use all four tires to the very peak of traction to help with braking or turning, during acceleration, the typical rear wheel drive racecar is much more limited. Even though a rear wheel drive car can be using all four of its tires to the limit during corner exit, only the rear tire are helping accelerate it forward. The front tires can only help with turning. The end result is that the overall traction “circle” for most cars is not actually round, and this means we need a new game piece car.
You can see how our new game piece maxes out at 1 g in braking, turning, or any combination of those, but once we begin to move around the circle toward acceleration, our max forward force is limited to .5 g. This may seem like a drastic drop, but .5 g of acceleration is nothing to scoff at and will take a car to 60 mph in 5.5 seconds. As is shown in the second image, you can actually get an idea of what the "game piece" shape for a car would be by using telemetry to look at its GG diagram from a track session.
 | 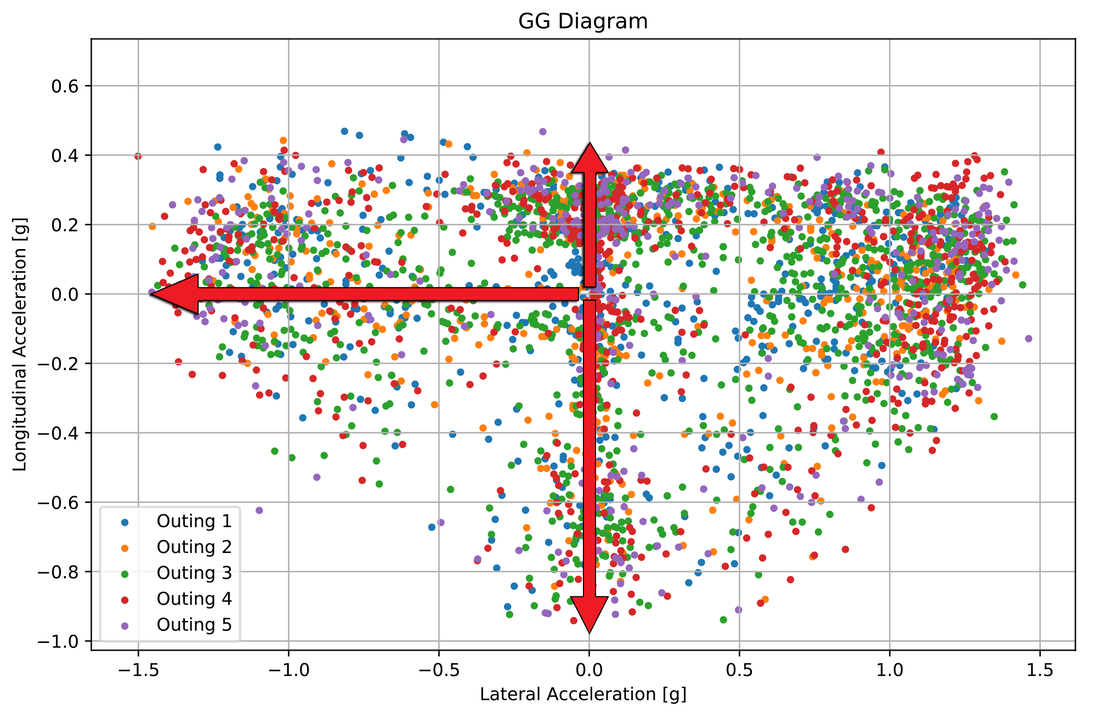 |
The key factor to pay attention to here is the ratio of lateral vs forward acceleration. Even the F1 car on our original game piece wouldn't truly have a round traction circle. It has phenomenal acceleration, but as it's rear-wheel drive only, this still doesn't match its turning and braking abilities. In comparison, to actually have a round game piece car, we would not only need four-wheel drive, but also enough power to keep all four tires at the edge of wheelspin throughout the entire corner exit. These kinds of cars do exist and in certain types of racing like rallycross you actually will see drivers take smaller arcs around hairpin corners. This is a very rare situation however, so for most corners and racing classes, the ideal solution is quite different. Let’s look now at how it’s actually the shape of a car’s true traction circle that determines how a corner should be optimized.
Back To The Races
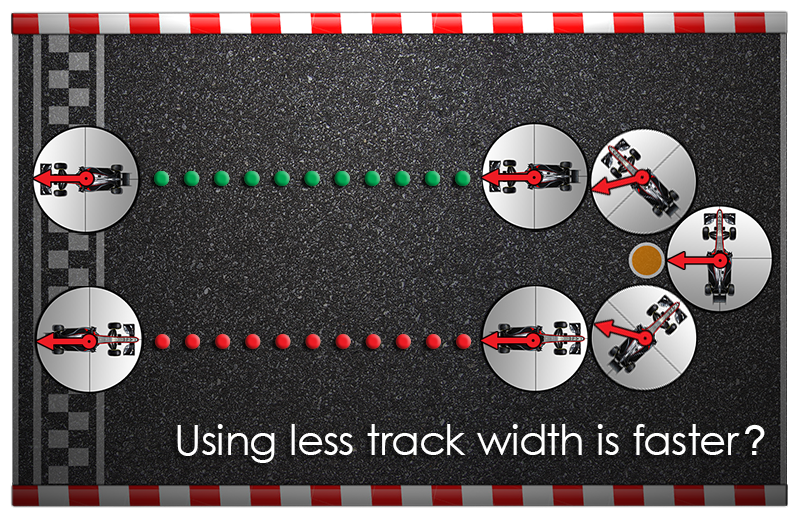
Let’s have our drag race again, only this time with our new game piece car representing a more typical performance vehicle. Car A will again be the one starting straight, and car B will start mid corner just as before. To understand what happens during the race, we’ve shown the cars at three identical positions indicated by the vertical lines and it will be easy to keep track by comparing their force arrows. The closer to the finish line the tip of the arrow is, the faster the car is accelerating in that direction. You can see how with our new game piece, car B would now be the winner. At the beginning of the race, car B would be accelerating toward the finish at 1 g, while car A would only be accelerating at half that rate. Throughout the corner exit, car B’s acceleration toward the finish line would drop until it matched car A’s performance once it was finally also going straight. From this point on, both cars would be equal, but car B would already have a sizeable lead.
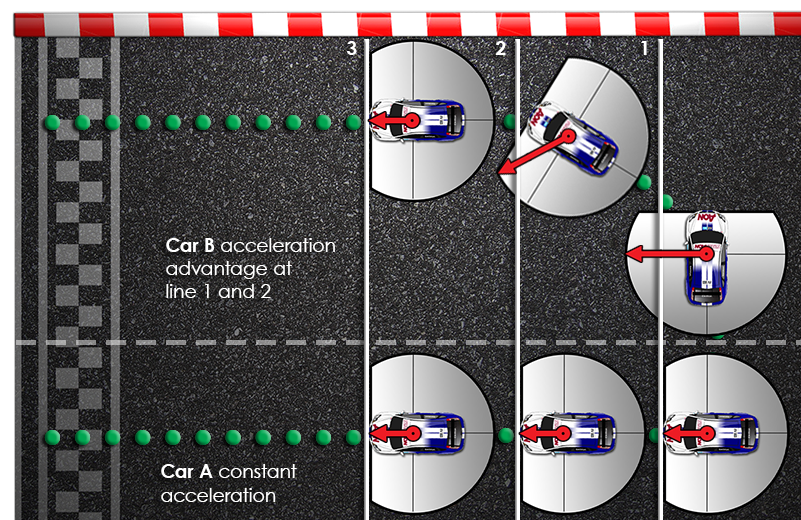
So the true reason we typically want to take a wide, track-filling arc through a corner is because we want to use that powerful lateral force component to help propel the car in the ideal direction. As odd as it may seem at first, the vast majority of cars will actually beat themselves in a drag race if they start the race driving sideways!
I hope you enjoyed this lesson. If you are interested in a complete guide to the physics of racing, we also offer The Science of Speed book series, available through our bookstore or at popular retailers such as Amazon.
by Adam Brouillard
by Adam Brouillard


