The racing line is much more than just the path you take around a racecourse. You can't just follow a certain line around a course and expect a good result. The ideal lap is the result of optimizing the forces acting on a vehicle, and the actual line taken is simply the result of this. The science of optimizing these forces is called line theory and when we introduced line theory with the Science of Speed Series, it was naturally accompanied by extensive explanation. But while a full explanation spans three books, the key line theory rules that a driver needs to know are actually quite basic and I’ve often found myself saying that I could probably fit them all on a single sheet of paper. I’ve also often found myself needing just such a quick reference guide, so this article is my attempt at creating a quick guide to the rules of the racing line. For a more complete explanation of the racing line, see the Racing Line Fundamentals lesson series.
All racetracks can be broken down into four key corner types. As of this writing, I have broken down nearly 50 tracks for Track Notes, and although it is sometimes quite a puzzle, they are all constructed out of these few basic pieces. All racing courses are - autocross, rally, oval, etc… Line theory is really just the science of moving an object as quickly as possible from one place to another, so it can technically be applied to just about anything racing related. A sprinter in the 100m dash is attempting to maximize the total force they can generate propelling them toward the finish line. From a line theory standpoint, this is the same as a racecar on a drag strip, as both are trying to maximize force in an ideal direction. This goal of maximizing force in an ideal direction is the core principle of line theory.
The standard corner rules
The first corner type we’ll cover is called a standard corner. This the most common type of corner that a driver will face and can include everything from a tight hairpin turn on an autocross course to a high speed corner that only needs the smallest of throttle lifts to make the apex. They all follow the same rules however, and not only this, but the rules for all other corner types are built from this most basic of corners.
The apex spectrum on a standard corner
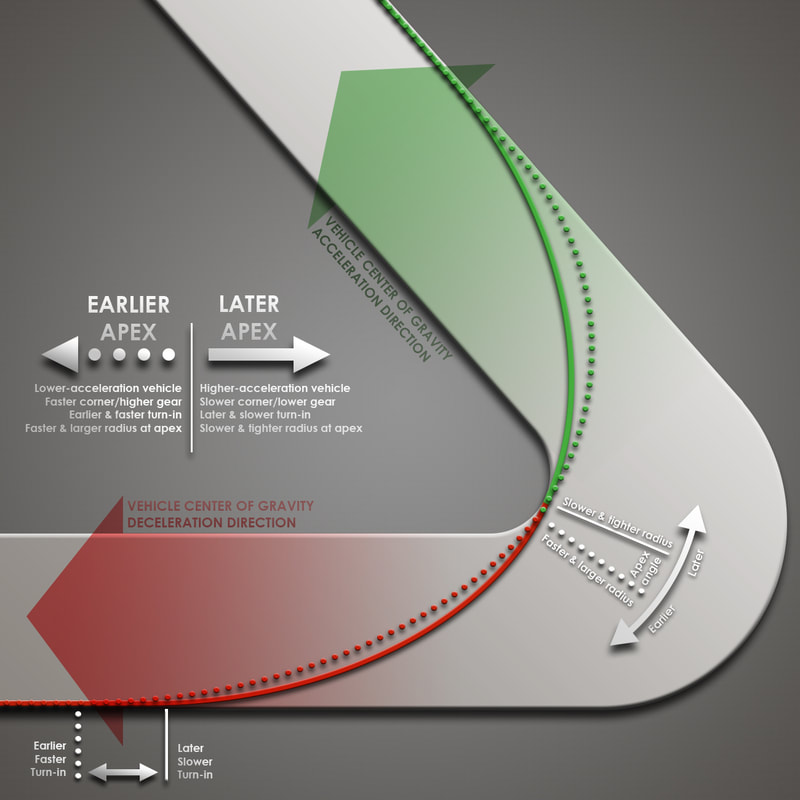
To optimize a standard corner, a driver’s goal is to maximize the total force they can generate with the car in the ideal directions. You can see in the illustration how the ideal direction changes at the apex and follows the angle of the track. Maximizing your gSum is just the first step to optimizing a corner. The driver should be at the edge of the traction circle throughout the corner, but also in the right place on the circle, at the right time. While proper training can allow a driver to eventually be able to optimize a corner based on this singular goal, line theory also gives us a set of rules that can let a driver know they are on the right track to achieving it.
- The ideal apex is determined by a car’s lateral vs longitudinal acceleration capabilities for a given corner. As a car’s ability to accelerate in relation to its cornering ability increases, it will need a later, slower apex. The illustration shows two lines. The solid line represents a 4-wheel drive car with enough power to keep all four tires at the limit throughout the entire corner exit. It has an Euler spiral shaped exit line. The dotted line represents a car that cannot accelerate even at full throttle. It has a circular exit line. Almost every vehicle will have an exit line between these two extremes.
- The apex should be the most limiting point along the inside of the track and also the point of minimum speed attained in the corner. With few exceptions, such as rear-brake karts that need a somewhat more circular entry, nearly every vehicle should have a corner entry path up to this apex in the shape of an Euler Spiral. The later apex in the illustration has a smaller spiral and goes along this spiral further, but they are both the same shape. I primarily look for a steady reduction in speed as the main indicator of a correct spiral shaped entry.
- The braking point does not affect this ideal corner entry path. Depending on the needed deceleration point, a driver may begin with straight-line braking prior to entering the spiral or they may continue into the spiral at full-throttle before switching to deceleration. If a driver enters the spiral at full-throttle however, they shouldn’t reach the limit until they begin decelerating.
- A car should either achieve full throttle at the apex or, if this is impossible due to wheelspin, not until the car is going nearly straight at the end of the corner. In the event of wheelspin, progressive power should be applied throughout corner exit. Progressive power doesn’t necessarily mean progressive throttle however, it depends on the shape of the car’s power band.
- While being as close to neutrally balanced as possible, a car should be at the understeer limit during corner entry, and the oversteer limit during corner exit. While these are the ideal states, they are not always possible unless a car’s setup is optimized for a certain corner. A full throttle exit, for example, will often be at the understeer limit, but a driver shouldn’t consider this an error and try to induce oversteer to correct.
- A standard corner racing line should typically take up the entire width of the track, and a driver can use this to determine their ideal apex. There are rare exceptions, which we’ll cover in a later rule, but if a driver doesn’t need the entire width of the track, they should use an earlier, faster apex. Likewise, if the driver runs wide at corner exit, this doesn’t mean they need to apply less throttle, it means they need a later, slower apex.
So there we have all the rules for a standard corner. Contrary to what some drivers have been told in the past, the length of the straight before or after the corner does not affect the ideal line and a geometric line would not be the fastest way through a corner if it was isolated on its own. You can actually see a side-by-side demonstration of this here.
Understand however that, although line theory shows us the ideal strategy, it’s important for a driver to take into account how the racing line is a risk vs reward situation. While an optimal corner entry only reduces your time in that one part of the corner, an optimal corner exit reduces your time all the way to the next corner. While this fact doesn’t affect the ideal line, it does make it imperative that a driver focuses on making sure their corner exit is correct. A driver needs to be ready to start accelerating at the apex even if their current skill level makes this require they compromise their entry somewhat. While a flawless trail braking spiral entry is the kind of thing that champions use to separate themselves from the pack, this ability typically only comes after years of training.
The chicane rule
Our next type of corner is a chicane, which is actually nothing more than two opposing standard corners that meet in the middle. The exit of one corner leads directly into the entry of another. Therefore, we will still follow the Standard Corner Rules, except with one key difference. While you will still optimize to the edge of the track for the initial entry and final exit, you won’t be optimizing to the edge of the track in between the two apexes of a chicane. You’ll instead be optimizing to imaginary track edges based around an ideal transition point, and for this, we’ll need a new rule - The Chicane Rule.
- The ideal chicane transition point requires immediate deceleration as the steering passes over center toward the 2nd apex. This links the two apexes, so if a driver needs a later 2nd apex to optimize the final corner exit, they should drive a later 1st apex… and vice versa.
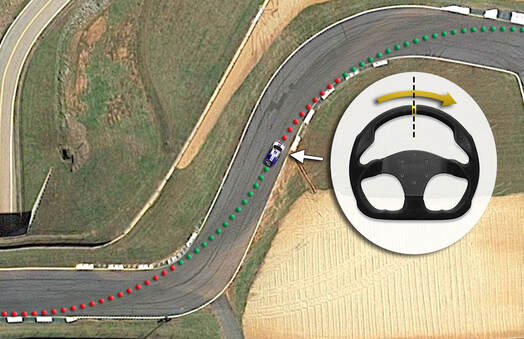 The ideal chicane transition point requires immediate deceleration as the steering passes over center.
The ideal chicane transition point requires immediate deceleration as the steering passes over center. Realize also however, that you can have multiple chicanes linked together. A slalom on an autocross course is an example of this. You would use the Chicane Rule to link the apexes and optimize them all as one. This is also a good time to point out that deceleration does not always mean brakes however. Just as a high-speed standard corner sometimes only needs a momentary throttle lift to allow aerodynamic and tire drag to slow the car down enough to make the apex, the short quick transitions of a slalom typically only allow a brief throttle lift as the steering passes back over center in the direction of the next cone.
It’s not just short, quick chicanes that might require this brief deceleration period however. Even a larger chicane might only need a momentary throttle lift at transition if it has an increasing radius. Chicanes are sometimes even radius, where both corners are about the same size, and this makes the transition point about equidistant between the two apexes. Chicanes can also be increasing radius however, where the second corner is larger and the transition point will therefore be closer to the second apex. Naturally, we will also face decreasing radius chicanes, where the second corner is smaller. This makes the transition point, and therefore the place the driver begins their deceleration spiral, closer to the first apex.
The Double Apex Rule
Up next is the double apex, which at first seems like just the opposite of a chicane where two corners are close together, but both turning in the same direction. While this can create a double apex, a double apex is actually quite a unique situation in line theory, as it is the one time on a racetrack where a driver is not trying to maximize force in one ideal direction. Rather than thinking of a double apex as two separate corners, it is actually more akin to a standard corner, except the driver gets caught in limbo at the apex. While a driver should still follow all the Standard Corner Rules for the entry and exit, in order to ensure they spend as little time in this apex limbo as possible, we’ll need another new rule – The Double Apex Rule.
- To optimize a double apex, a driver should avoid a speed reversal between the two apexes. This links the two apexes, so if a driver needs a later 2nd apex to optimize the corner exit, they should drive an earlier 1st apex… and vice versa. A speed reversal would be accelerating and then decelerating or accelerating and then decelerating. There should be a steady change in speed between the two apexes.
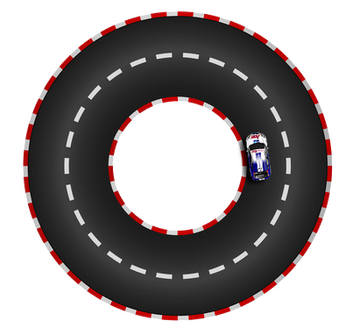
I think the easiest way to understand what’s happening in a double apex is to picture how you would drive around a circular racetrack. A driver would want to avoid accelerating, as this would carry them away from the inside where they would then have to decelerate to bring them back to the inside.
You would want to avoid this speed reversal by simply hugging the inside and driving as fast as possible at a constant speed. In fact, simply driving a constant speed is what a double apex corner would require if the entry and exit were even. Just as in a chicane however, we have increasing radius double apexes where the driver would steadily increase speed between the two apexes, and decreasing radius double apexes where the driver would steadily decrease speed. The key here is that once a driver begins decelerating or accelerating as they pass the 1st apex, they should maintain this until they reach the 2nd apex and their corner exit begins.
You would want to avoid this speed reversal by simply hugging the inside and driving as fast as possible at a constant speed. In fact, simply driving a constant speed is what a double apex corner would require if the entry and exit were even. Just as in a chicane however, we have increasing radius double apexes where the driver would steadily increase speed between the two apexes, and decreasing radius double apexes where the driver would steadily decrease speed. The key here is that once a driver begins decelerating or accelerating as they pass the 1st apex, they should maintain this until they reach the 2nd apex and their corner exit begins.
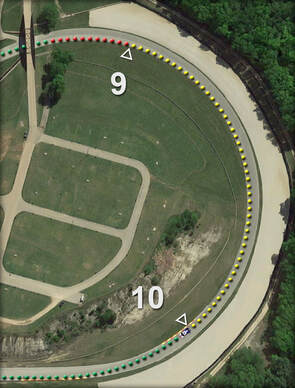 Realize also that, while many times a double apex will have two distinct apexes, you also use the Double Apex Rule any time the driver has finished their entry, but can’t begin their corner exit yet. This is quite common in long carousel type corners where you need to “double apex” the middle of the corner by following the inside of the track for a distance, just as in our circular racetrack example. Finally, while you will find double apexes linked in series with chicanes, you will never find two double apexes linked directly together. Likewise, there is no such thing as a triple apex, quadruple apex, etc… Turns 9 and 10 at Road America should be "double apexed" and the driver should try to avoid a speed reversal between the two apexes. |
The Full Throttle Corner Rule
Our final corner type is a full throttle corner, which is simply a standard corner where the driver can maintain maximum acceleration throughout and doesn’t need to optimize to the outside track edges. While you can typically get a good enough result in most isolated full throttle corners by smoothly arcing through them, sometimes they lead directly into or follow directly after another corner. In these situations, a more optimized solution is needed – The Full Throttle Corner Rule.
- To optimize a full-throttle corner, a driver should drive the shortest path possible by setting their entry spiral to ensure the car reaches the limit just as they pass the apex. The driver should then continue at the limit, turning the vehicle until it is aimed directly at the next corner.
A four corner continuum
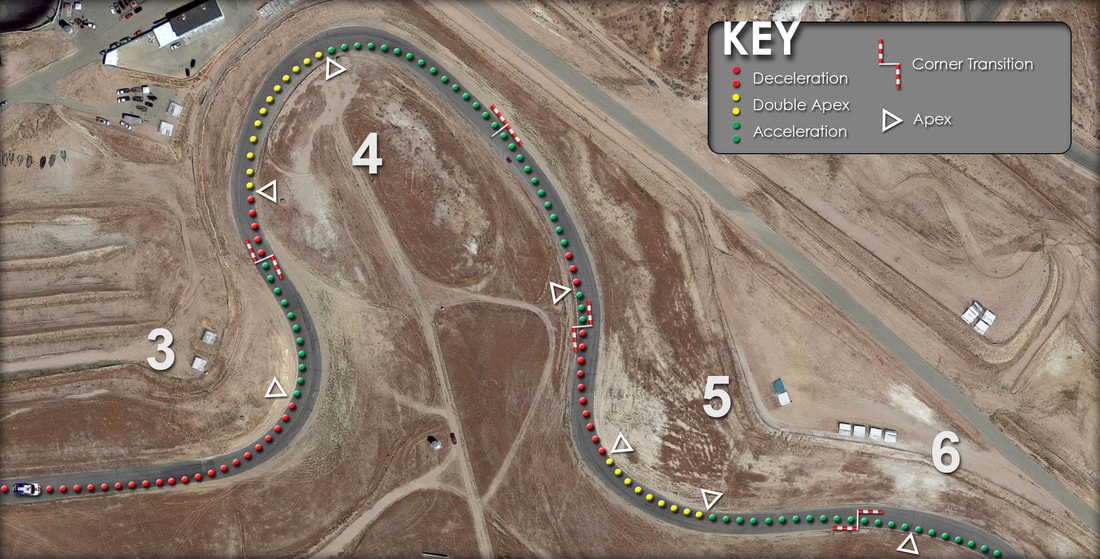 Turns 3 through 6 at Willow Springs is a complex sequence containing all four corner types.
Turns 3 through 6 at Willow Springs is a complex sequence containing all four corner types. So these four - the standard corner, the chicane, the double apex, and the full-throttle corner make up all the corner types. We can also see now how the last three are simply variations on the first, so it’s important to realize your goals on track will never suddenly make a drastic change if you make a mistake or drive a different car. For example, it’s easy to understand that having a bad exit from a previous corner could turn a standard corner into a full-throttle corner, but a more advanced example is that corners with a rounded inner edge will sometimes be a standard corner for slower cars needing an earlier apex, but become a double apex for faster cars needing a later final apex. These higher acceleration vehicles may need to “double apex” the center of the turn for a short distance, maintaining a steady speed, before they are able to go to throttle.
Understanding how the rules fit together and how one type of corner blends into the next is important, because often the most difficult parts of a track are the one ones right on the edge between one corner type and another. I do have one more rule I want to go over however, and although it’s not a new corner type, it’s important enough that I wanted to discuss it separately. The 90-Degree Limit Rule.
Understanding how the rules fit together and how one type of corner blends into the next is important, because often the most difficult parts of a track are the one ones right on the edge between one corner type and another. I do have one more rule I want to go over however, and although it’s not a new corner type, it’s important enough that I wanted to discuss it separately. The 90-Degree Limit Rule.
The 90-degree Limit Rule
Remember that the core goal of line theory is to maximize force in the ideal direction and we typically do this by using every last inch of track width available. This is really just a shortcut however, and doesn’t always work. Sometimes a corner is laid out in a way that if we optimize to the track edge, we actually start to cancel out the forces we are trying to generate and our line becomes inefficiently long. To avoid this situation, we’ll need the 90-Degree Limit Rule.
- Neither a driver’s entry nor exit arc should exceed 90 degrees.
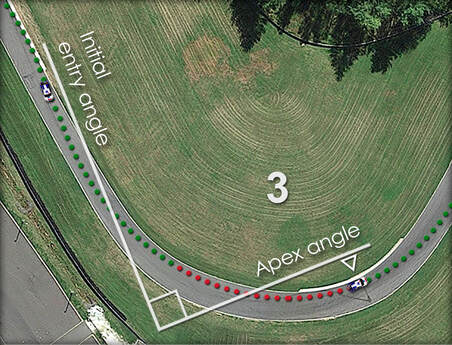 Click the image for a more detailed break down of Lime Rock Park.
Click the image for a more detailed break down of Lime Rock Park. Needing the 90-Degree Limit Rule is pretty rare - only about 1 in 4 tracks I’ve come across required it. When it is needed however, you’ll be glad you have it, because corners that don’t optimize to the track edge are some of the most notoriously difficult to optimize. Turn 3 at Lime Rock Park is a good example of this. While many drivers feel enticed to go all the way to the outside track edge during their entry, this will make their line inefficiently long. They instead need to begin their spiral entry exactly 90 degrees from the apex.
You always want to use up to 90 degrees for your entry or exit if possible, but no more. For newer drivers, I often have them use aerial shots to find reference markers helping them stay within the 90-degree limit. As drivers advance in skill however, they often no longer need these reference markers as they learn to start driving based on the core principles of line theory itself.
You always want to use up to 90 degrees for your entry or exit if possible, but no more. For newer drivers, I often have them use aerial shots to find reference markers helping them stay within the 90-degree limit. As drivers advance in skill however, they often no longer need these reference markers as they learn to start driving based on the core principles of line theory itself.
No more Rules
While the rules can tell a driver if they are doing something wrong, there is no rule that can tell them they are doing everything perfectly right. Perfection is a goal we can never quite reach or even truly know how close we are. Just as a drag racer can understand the basic rule of needing to accelerate toward the finish as quickly as possible, they’ll also know they could always be just a little faster at the lights, or control the throttle a bit better, or do better at countless other small things. But although a drag racer, or sprinter, or slalom skier, or any other racer will never quite know how far from perfection they are, they can all develop the ability to self-analyze their performance so they can work toward that elusive perfect run.
The best drivers I have ever worked with always have the uncanny ability to predict their times. This is no coincidence because an elite level driver has learned “what fast feels like” and that’s why they can do it at any track, with any car. It’s this ability that allows a driver to move past the rules and begin to simply follow the core principles of line theory itself by actually learning to feel how well they are generating forces in the ideal directions. I call this the “Universal Cue” and I named it this because eventually it is all that is needed. You can watch a world class driver’s lap and see them correctly following all the rules, but none of this was pre-planned or intentional, they just followed the core principle of line theory and that was the result.
The best drivers I have ever worked with always have the uncanny ability to predict their times. This is no coincidence because an elite level driver has learned “what fast feels like” and that’s why they can do it at any track, with any car. It’s this ability that allows a driver to move past the rules and begin to simply follow the core principles of line theory itself by actually learning to feel how well they are generating forces in the ideal directions. I call this the “Universal Cue” and I named it this because eventually it is all that is needed. You can watch a world class driver’s lap and see them correctly following all the rules, but none of this was pre-planned or intentional, they just followed the core principle of line theory and that was the result.
I hope you enjoyed this article. If you are interested in a complete guide to the physics of racing, we also offer The Science of Speed book series, available through our bookstore or at popular retailers such as Amazon.
by Adam Brouillard
by Adam Brouillard


